Publication
details
Hazardous object detection in bulk material transport using video stream processing
Authors
Vanessa Meulenberg, Kamal Moloukbashi Al-Kahwati, Johan Öhman, Wolfgang Birk & Rune Nilsen
Published date
2024-01-01
Venue/publisher
International Congress and Workshop on Industrial AI and eMaintenance
Keywords
Pattern recognition, Image analysis, Convolutional neural networks, Labelling, Autonomous decision making, Object detection
Summary
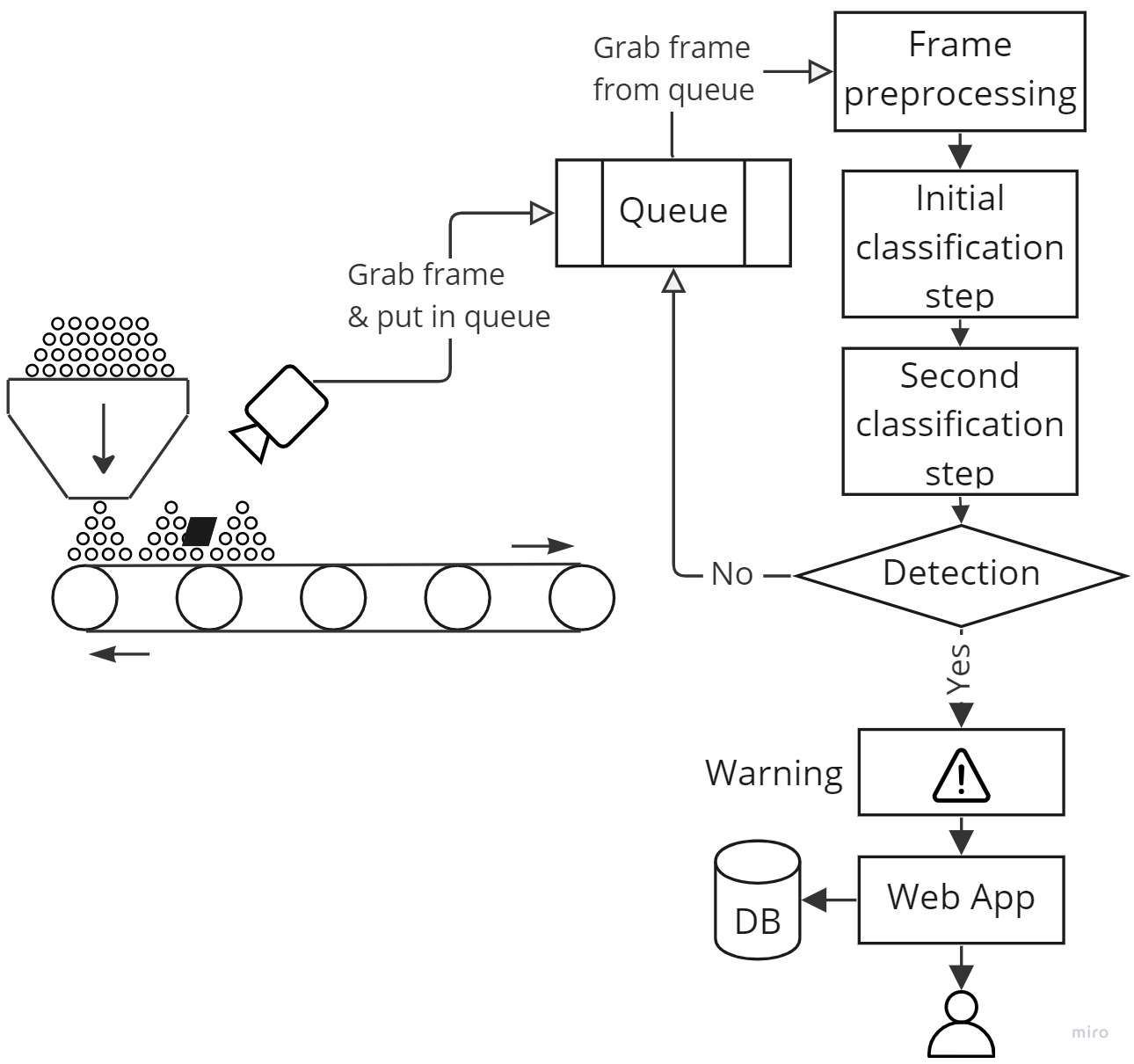
Belt conveyor systems are a primary means of bulk material transport in industrial applications due to their high bulk capacity and limited need for human involvement. Abnormal objects on the belt conveyor can be hazardous to the operation of the belt conveyor systems and/or downstream equipment. The dependability of production on a well-operating system in combination with the high degree of automation and limited inspection accessibility, establishes the need for a continuous and fully automated monitoring solution. In this paper, a monitoring solution comprising a camera, object detection and classification model, and decision support is presented and discussed. The detection and classification model is comprised of two steps: a classical brightness and contour detection algorithm using colour channel weighing, and a subsequent processing by a Convolutional Neural Network (CNN). The CNN performs a classification of the detections as True Positives (TP) or False Positives (FP). Further, the object size is estimated providing a measure for the risk imposed by the object. The solution makes use of an off-the-shelf industrial network camera that communicates with an edge computing device close to the installation site. The edge device is further connected to a SaaS solution for predictive maintenance and decision support where results (classified detections) are visualized in a dashboard. There, operators can assess classified detections as TP or FP, which provides a ground truth for subsequent retraining of the solution. Moreover, these actionable insights enable a warning and stopping mechanism that can be implemented when the operators trust the solution. The solution is implemented and tested at LKAB Narvik and operational since 2021. Initially, the solution was trained using artificially introduced objects and manually labelled video frames, followed by a validation phase to assess the performance of the solution. The solution exceeds targeted performance while having a low false positive rate.
Citation
Meulenberg, V., Moloukbashi Al-Kahwati, K., Öhman, J., Birk, W., Nilsen, R. (2024). Hazardous Object Detection in Bulk Material Transport Using Video Stream Processing. In: Kumar, U., Karim, R., Galar, D., Kour, R. (eds) International Congress and Workshop on Industrial AI and eMaintenance 2023. IAI 2023. Lecture Notes in Mechanical Engineering. Springer, Cham.